Segnaliamo vari sensori gas della linea Grove




Il progetto LABijk ha alcuni aspetti molto ambiziosi. Uno di questi è archiviare nel database le caratteristiche di ogni dispositivo microcontrollere, sensore od attuatore per poter generare in automatico il firmware di ogni microcontrollore.
In ambito Debian ed Ubuntu cominciamo ad introdurre dalla compilazione all’upload a riga di comando del firmware nelle schede Arduino.
Si inizi aggiornando l’ambiente:
apt-get update
poi si proceda installando i primi programmi necessari allo scopo:
apt-get install arduino picom python-setuptools
in seguito si installi il gestore librerie di Python 2.7:
easy_install-2.7 pip
Infine si installi la libreria Python ino:
pip install ino
Controlliamo i moduli installati dal framework ino:
ino list-modules
Se la risposta è positiva allora possiamo cominciare con il primo esempio, che chiamiamo lab000.
Creiamo la cartella lab000 che svolge il compito di essere la cartella base:
mkdir lab000
ci posizioniamo nella cartella
cd lab000
Quindi creiamo il progetto per Arduino
ino init
Il precedente comando crea due cartelle: src che contiene gli sketch e lib che contiene le libreire.
Completiamo la sorgente sketch.ino ed infine compiliamo per l’Atmel
ino build
per caricare il nuovo firmware, collegare la scheda Arduino alla USB ed avviare
ino upload
In prossimi articoli cominceremo a creare la struttura dati e il programma che genera in automatico ogni sketch di una specifica applicazione LABijk.
Il bus di comunicazione tra i microcontroller al livello i e quello a livello j principale è RS-485.
Presentiamo un’ottima introduzione alla seriale RS.485 per poterlo espandere nel progetto.

Arduino Yun, grazie a Michele per la segnalazione, è un nuovo prodotto che potrebbe essere molto interessente nel progetto LABijk.

Infatti integra tre microntroller con schede di rete e wireless al prezzo di circa 50 €.
In pratica sono due computer: il tradizionale Arduino con il bus IO che lo caratterizza ed un Atheros AR9331 a 400MHz con Linux Linino direttamente mutuato dal grande progetto DD-WRT, ovvero distribuzione Linux per sostituire il firmware dei più diffusi router con un sistema operativo Linux.
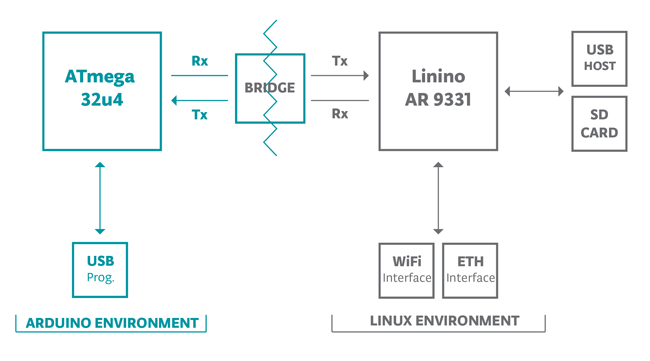
DD-WRT è un progetto fondamentale che permette di migliorare nettamente la conoscenza sui router che usualmente si utilizzano. Infatti questi dispositivi non vengono più visti come indipendenti dalla realtà usuale, ma come computer con un loro os, in genere proprietario, che può essere sostituito con Linux. Questo nuovo punto di vista permette, tra i molti aspetti, di comparare dispositivi diversi.
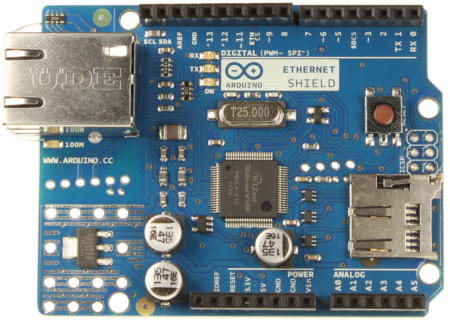
L’integrazione con LABijk è in termini di nodi connessi al padre con ethernet. Infatti Arduino è molto debole sotto il profilo dello shield ethernet. Yun coniuga l’ottimo Arduino tradizionale con l’elettronica tipica di un brillante router moderno e un sistema operativo innovativo per router.
L’effetto è di poter costruire nodi con rete, wireless ed micro compact flash concorrenti e con le usuali caratteristiche, nel senso che la scheda di rete vista attraverso la libreria Arduiono è piuttosto debole, ma una cCPU da router con dd-wrt invece realizza un dispositivo eccellente. ARM board potrebbero competere: maggior potenza allo stesso prezzo, ma
sono punti a favore di Yun.
Ringrazio Marco M. che riapre il diabattito proponendo CAN bus come alternativa al bus RS485.
CAN è il bus utilizzato nelle automobili moderne, negli apparecchi elettromedicali e nell’industria.
Sicuramente alza di molto il profilo e quindi va provato.
Ma il grande problema è nei costi alti, per esempio, la sicuramente ottima scheda della SparkFun CAN-BUS Shield DEV-10039 sarebbe un’eccellente scelta ma costa più del doppio della scheda microcontroller.

Un po’ di tempo fa volevo avviare dei test soprattutto verso il bus dell’automobile.
E’ interessante il post tratto dalla pagina del prodotto Sparkfun:
“If you are using this board to actually create a CAN bus system (as I am for a robotic drone vehicle) then the skpang (designer of this board) code is not that helpful and a bit of a mess. It is well and good to be able to read things from your vehicle and log them, but that’s not helpful when you are trying to create an actual bus.Also, I really find it difficult when sample code does every conceivable thing all at once, forcing you to piece out the parts/understanding you need.
To create a network of senders and receivers, I tried a few different libraries. I recommend using the CANDUINO one http://code.google.com/p/canduino). Although the boards are not exactly the same, it will work, and you can see a sender and receiver working. Other libraries I tried, such as the one from saeed studios, didn’t work for me, even though their boards are pin compatible. Might have something to do with their library using a CAN interrupt which, for me, was not reliable. Receiver would get only a single CAN message and then the interrupt would never fire again. Who knows why. Spent a number of hours on this.
So just want to save other folks some time if they are looking to build an actual bus system, and not just read data from their vehicles.”

La scheda utilizza il componente elettronico MCP2515 che si collega verso Arduino mediante SPI.
La porta SPI, che è una seriale molto veloce adatta per esempio per collegare CAM SPI, ma apre alcune problematiche spinose con Arduino: non rientra nel contesto usuale gestire più di una SPI, che viene utilizzata in modo esclusivo da atre periferiche quali lettore SD oppure (aut) dalla scheda ethernet. E’ noto che chi ha utilizzato l’ethernet shield, il programma che inserisce non può aprire contemporaneamente la scheda rete e un file in SD.
La gestione SPI su Arduino è piuttosto complessa.
L’alternativa è usare I2C o wire, bus molto più lento, creato dalla Philips come seriale veloce per interconnettere componenti elettronici, per esempio la scheda madre con i suoi sensori. Ma si aprono molte problematiche: le tensioni in gioco sono i 3.3 o i 5V e sono piuttosto delicate, è delicato convertire il segnale tra tensioni, il cavo non può superare grossomodo il metro e mezzo, un componente instabile sul bus può compromettere la comunicazione, …
Molti invece sono i motivi a favore del I2C: è il più diffuso bus tra componenti elettronici, quindi ci si apre alla comunicazione con l’elettronica, la libreria I2C per Arduino è abbastanza stabile, Grove ha un HUB per I2C per Arduino, ….

Arduino gestisce in origine la seriale usata per comunicare verso USB, PIN 2 e 3, con il secondo microcontroller a board (il vecchio chip FTDI è superato).
La libreria seriale poi è stata affiancata da una libreria migliore che permette di gestire più coppie di pin in contemporanea, quindi avere più seriali TTL. Il chip MAX485 incanala la coppia di PIN al bus RS485.
Il segnale è bilanciato, collaudatissimo, può arrivare a 1200 metri, richiede due resistenze di terminazione. Le velocità sono quelle della seriale. Il protocollo è da perfezionare.
Il progetto LABijk, per la complessità strutturale che lo caratterizza, richiede un’attenta riflessione sulle sue scelte di fondo: il microserver, l’architettura di questo, i microcontroller, lo standard verso attuatori e sensori, i bus di comunicazione, i protocolli di sicurezza, e molto altro.
In uno sviluppo aperto andremo a classificare in modo ordinato ogni punto citato ed altri ritenuti indispensabili.
Continuiamo il nostro dibattito soffermandoci a riflettere sul/i bus di comunicazione da adottare tra il microserver e i dispositivi i al primo livello .
E’ ovvio pensare ad ethernet, ma pesano le seguenti argomentazioni
Quindi ethernet è solo per usi specifici e vedrebbe Arduino fuori gioco, precludendo tutta la gestione dell’elettronica in stile Arduino.
I vecchi bus seriali tipo RS232 sono lenti soprattutto se il dispositivo centrale, in questo caso il micorserver, fa pooling tra i periferici. Ricordiamo che una gestione ad eventi che parta dalle periferiche è esclusa perchè si perde il controllo delle periferiche stesse.
Consideriamo il bus USB:
Linux permette il controllo preciso delle porte USB, test verso Arduino, attraverso USB, mediante programma compilato C++ in pooling mostrano il funzionamento ininterrotto in mesi.
Un aspetto delicato da capire per bene è l’adozione, da parte del gruppo di progettazione Arduino, del reset in caso di perdita di connessione del BUS USB. Aspetto che si rivela invece estremamente utile per il recupero eventuale di una periferica fuori controllo: basta chiudere e riaprire la porta USB.
I microcontroller i di primo livello, connessi al microserver centrale tipicamente mediante USB, devono comunicare con gli altri ij del secondo livello.
Le seguenti osservazioni portano alla migliore scelta per queste tratte:
Quindi la scelta è il bus RS485.
Le ultime considerazioni sono relativa all’ultima tratta ovvero dai dispositivi ij a quelli ijk, che sono sensori, attuatori ed elettronica varia:
Il progetto LABijk è ambizioso, ma fattibile. Le applicazioni nel mondo elettrico e non solo, per esempio nel condizionamento di ambienti, sono molteplici.
Il livello i è costituito dai microcontroller direttamente connessi al microserver.
Le connessioni previste sono USB od ethernet.
Una ARM board sarebbe nettamente migliore, ma
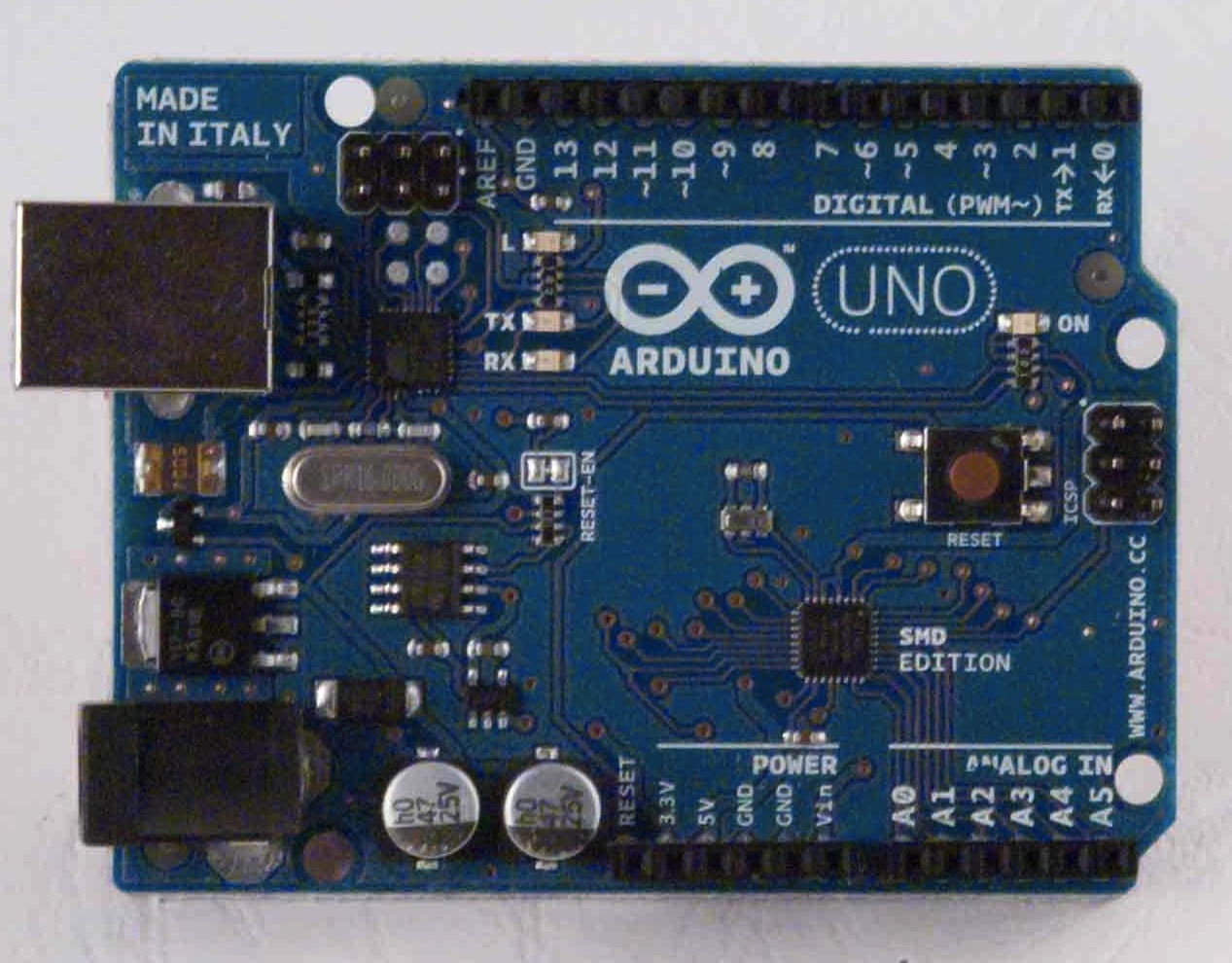
Mel caso di livello j allora non vi è dubbio che l’Arduino SMD sia l’unica soluzione:
PcDuino è una scheda ARM Cortex A8 con 1GB RAM, 2GB Flash e circa 10W di consumo massimo.
Permette l’esecuzione di Ubuntu 12.10 o Android e propone il bus Arduino in simulazione, permettendo quindi di utilizzare forse gran parte delle schede elettroniche nello standard Arduino esistenti nel mercato.
Il prezzo è nettamente superiore della RaspBerry PI, che però non permette di utilizzare l’elettronica Arduino.
Comunque entrambi sono troppo deboli e con criticità nello storage, per esempio non gestiscono un canale SATA e caricano il file system su una microSD, da non entrare nel mondo dei microserver.

Dimensions: 125mm X 52mm
Features:
Il progetto è ambizioso, fattibile e di qualità.
Estrapoliamo alcuni punti che rendano un certo profilo:
Segnaliiamo il suggestivo articolo per l’utilizzo di un router con Linux Embedded con CPU Cortex-A8 Allwinner A10 ad 1GHz, dotata di 1GB di DDR2 RAM e 2GB su SD.
I punti deboli sono l’assenza di storage, la fragilità del sistema operativo in SD, la mancaza di un vero e proprio archivio RDBMS, un framework molto articolato per un ARM A8, l’ottimo, ma produce una filiera forse lunga per l’Allwinner, Node.js per le app verso palmari …
Il progetto intende promuovere tecnologie open source ed open electronics.
Si supponga di voler gestire sensori ed attuatori.
Poniamo al centro un microserver, con sistema operativo Linux Server, eventualmente connesso ad internet ed a reti locali.
Questa macchina archivia un resoconto di tutto quello che viene fatto e comunica con tablet, telefoni ed altri sistemi anche attraverso internet. Abbiamo già dato alcune indicazioni sulle possibili scelte in articoli precedenti.
Distinguiamo tre livelli, per l’appunto i, j e k di aggregazione dispositivi.
Alla radice poniamo il microserver.
I primi nodi, di livello i, siano microcontroller Arduino SMD Uno o Ethernet, connessi al microserver via USB o ethernet. Le schede Arduino siano dotate dispositivi adattatori seriali RS485.
Il secondo livello, detto j, è costituito da dispositivi Arduino SMD UNO con shield Grove e connessi al padre mediante seriale.
Al terzo livello, detto k, poniamo attuatori e sensori connessi ai padre mediante cavi Grove, oppure cavi multipolari a 4 capi, schermati o non, telefonici o di rete. Lo standard Grove può essere convertito da adattatori nel formato RJ13 per cavi telefonici o RJ45 per usuali cavi ethernet.
Ogni dispositivo è individuato da coordinate i.0.0 oppure i.j.0 oppure i.j.k
I comandi sono del tipo i.j.k:<comando:valore,…>
Il microserver è dotato di servizio che interroga costantemente in pool i dispositivi di livello i, mediante USB. Un secondo servizio che è simile al precedente ma per i dispostivi connessi mediante rete.
I dispostivi Arduino di coordinate i sono in ascolto verso il microserver, quindi USB o socket, ed anche interrogano il pool dei figli connessi mediante seriale.
I dispositvi di livello j sono in ascolto verso i dispositivi padri ed eseguono l’interrogazione in pool dei sensori, o meglio le entrate, oppure cambiano lo stato delle uscite.
Nel microserver esiste un database “automazione” con le tabelle
Il microserver esegue un servizio che interroga in pool i dispositivi di livello i e riporta comandi e cambiamenti di stato nelle tabelle corrispondenti.
Un secondo servizio legge i cambiamenti di stato, consulta le tabelle di correlazione e scrive i comandi da eseguire nella tabella comandi.
Un terzo legge la tabella comandi e instrada il comando nel ramo corretto.
Tutto è riportato in tabelle e viene a costituire in sistema three-tier architecture, con pilastri di appoggio quali PostgreSQL, Apache, OpenSSH, Postfix, …
Precisiamo che
Consideriamo un semplice esempio.
Supponiamo di avere un sistema di dimensione 5.3.5 ovvero al microserver sono connessi 5 dispositivi con il ruolo di HUB RS485, ad ognuno di questi sono connessi al più 3 dispositivi di livello j con HUB Grove, ad ognuno di questi al più 5 sensori o attuatori.
I dispositivi di livello j sono dotati di firmware che permette di sapere e gestire perfettamente i sensori od attuatori ad essi connessi. Inoltre questi dispositivi sono in pool rispetto i sensori ed attuatori.
Consideriamo il dispositivo di livello j di coordinate 3.2.
Supponiamo che abbia 2 attuatori ed un sensore di coordinate 3.2.3.
Il sensore sia un interrutore bistabile (entrata a due stati).
Ora se l’interrutore viene azionato e cambia stato, il dispositvo 3.2.0 costruisce il cambio stato 3.2.3:on (ma meglio introdurre la notazione definitiva 3.2.1:1 ) ed instrada il cambio stato al padre, il quale lo riporta al microserver che lo scrive nella tabella cambio stato.
Il servizio predisposto, nel microserver, rielabora secondo tabelle di correlazione il cambio stato, che viene elaborato, ovvero chiuso e crea gli opportuni comandi.
Mel nostro esempio il comando è 3.2.1:on ma meglio 3.2.1:1
Quindi il servizio legge il comando e lo instada al dispositivo 3.0.0 che lo gira a 3.2.0
A questo punto il dispositivo 3.2.0 elabora il comando alzando il livello all’uscita corrispondente.
Il progetto infine prevede la creazione di una GUI che gestisce le tabelle nel RDBMS del microserver.
La GUI permette di descrivere l’intero impianto mediante griglie di correlazione.
Quindi il programma prevede l’opzione di creare al volo ed in modo completamente automatico il firmware per ogni Arduino ed aggiornarlo via USB.
Perciò ogni Arduino deve venire correttamente etichettato mediante le coordinate i.j.k e connesso mediante USB al computer con la GUI di gestione per il travaso del firmware. L’operazione precedente deve essere rifatta nel caso che cambino i figli.
Il progetto si conclude con la realizzazione di App per Ubuntu Phone e Tablet, Android e iPhone di gestione ordinaria. L’obiettivo più ambizioso vorrebbe creare piante dei sistemi SVG e sovrapporre dei widgets dinamici visuali che rendano visuale il comportamento del sistema.
L’applicazione più importante sarà il controllo del CED quindi di una stanza con molti server. L’obiettivo è di controllare la linea di rete, le temperature, i tasti di accensione, reset di ogni server strategico. Le App mostreranno visualmente lo stato di ogni server e permetteranno operazioni quali spegnimento ed accesione “fisica”. Verranno gestiti i tempi di sostegno degli UPS e lo stato dei gateway verso l’esterno.
Stiamo valutando le possibili modalità di espansione della piattaforma Arduino.
In breve ci sono due versanti: a monte, ovvero un host di appoggio, ed a valle, ovvero sensori ed attuatori.
Il secondo aspetto, quello verso i sensori ed attuatori, porta alla grande questione di non poter sempre saldare ogni componente: serve uno shield che dia uno standard minimo verso l’elettronica finale.
Abbiamo deciso di valutare la proposta Grove della http://www.seeedstudio.com, dinamica azienda cinese, per integrarla nella progettualità futura. Forse la proposta più ampia.
I test sono orientati soprattutto alle esigenze di installatori ed integratori anche di piccole dimensioni. Imprese che non possono fare enormi investimenti in risorse economiche ed umane per attività di sviluppo su microcontroller ed altra elettronica, ma possono creare spazi virtuosi componendo tasselli di varie provenienze.